Since 1950, we have been developing and
constructing small robots, machines that respond
to their environment and behave by themselves, or operate by remote control, or play games
with people, etc.
A main purpose of this program was to make "Robot Show-Stoppers", to help meet the problem of an advertising director who wants to put into his display in a show or convention some device which will "STOP" every person there and make him notice it.
We have had a second and perhaps more scientific purpose, however, in this program of development: this is to explore the intelligent behavior of machines and master their techniques. As a consequence, some of our existing small robots are in a relatively unpolished state and if appearance is an important factor, to make a small robot presentable in a show a fair amount of work may be needed.
Besides the small robots which we have already started and which are described below an advertising director will often think of an other type of small robot. It is usually possible to make such a robot.
In addition, modifications of existing small robots to fit a particular purpose are usually possible, such as use of particular components, display of particular slogans, etc.
Two of our small robots have appeared on the front covers of magazines, "Scientific American" and "Radio Electronics". These were Simon, a miniature mechanical brain, and Squee, an electronic robot squirrel. These and others of our small robots have also had stories in "Popular Science", "Newsweek", the "New York World-Telegram", the "New York Times", and other publications. In the issue of "Life" Magazine of March 19, 1956, three pages were devoted to a story of Squee, Relay Moe (machine that plays tit-tat-toe), and the Geniac electric brain construction kit that we sell for $17.95. (One wired-up Geniac appears in Figure 5.)
This report is in three parts. The first part of the report describes our small robots to some extent: their purpose, what they will do, what their present state is, and in many cases the approximate cost of the work done to date. This cost naturally is one of the factors affecting price or rental. The second part of this report discusses what can be put into robots at this time, in view of present scientific and technical possibilities and limitations. The third and last part is brief; it discusses the basis of prices and rentals.
We shall be glad to have comments from any reader of this report.
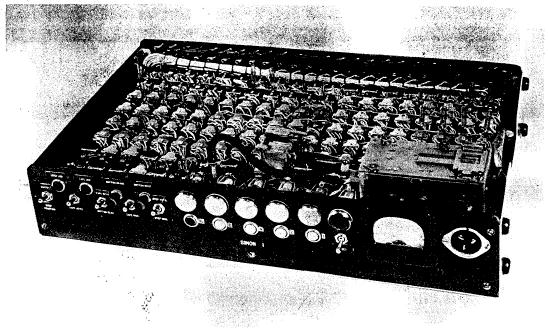
1. Simon (named after Simple Simon of Mother
Goose fame -- see Figure 2) is a minature
mechanical brain containing 129 relays, a stepping switch, and a five-hole paper tape feed.
It takes in numbers and instructions on a punched paper tape, and shows the answers to a problem in lights. It can take in numbers from 1 to 255 in binary notation, and it can perform any of nine operations including addition, subtraction, greater than, selection, etc. It has been exhibited in nine cities of the United States and has always interested and entertained the audience. Data: completed; professionally finished; 99% reliable; maintenance, difficult; our costs, about $4,000.
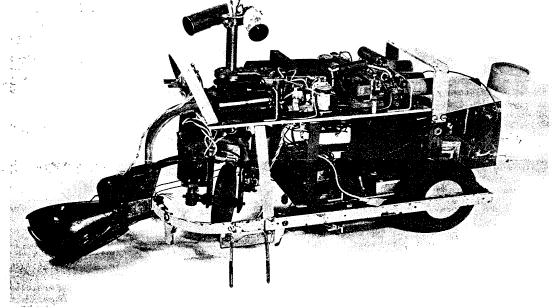
2. Squee (named after "squirrel") is an electronic robot squirrel (see Figure 1). It contains four sense organs (two phototubes, two contact switches), three acting organs (a drive motor, a steering motor, and a motor which opens and closes the scoop or "hands"), and a small brain of half a dozen relays. It will hunt for a "nut". The "nut" is a tennis ball designated by a member of the audience who steadily holds a flashlight above the ball, pointing the light at Squee. Then Squee approaches, picks up the "nut" in its "hands" (the scoop), stops paying attention to the steady light, sees in stead a light that goes on and off 120 times a second shining over its "nest", takes the "nut" to its "nest", there leaves the nuts, and then returns to hunting more "nuts". When Squee is operating, it is a dramatic and exciting example of a robot. It has been exhibited in New York, Pittsburgh, and Minneapolis, and has always entertained and excited the audience. The machine however is sensitive to the surrounding light level, and usually has to be shown in a room about 8 by 10 ft. with only a small amount of overhead light and black curtained walls. Data: completed; rather well finished but not professionally; 75% reliable; maintenance, difficult; our costs, about
$3,000.
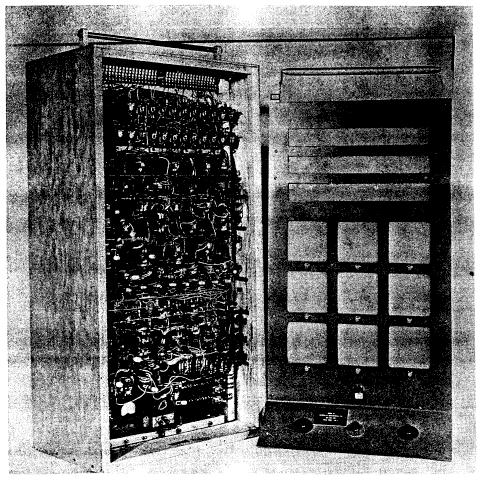
3. Relay Moe (named to rhyme with "tit-tat-toe"
-- see Figure 3) is a machine using about 90 relays, and a plastic timing drum that operates cams. It plays ordinary three-by-three tit-tat-toe with a member of the audience. It will either win or draw all the time, or it can play a less than perfect game, allowing the human player to win some of the time. The variable winning power of the machine can be selected or chosen at random. The machine was exhibited at the Guardian Relay exhibit, IRE Show, N. Y., March 1956. We believe the machine is dramatic and exciting. Data: completed; professionally finished; reliable (contains no tubes); main tenance, probably difficult; our costs so far, about $3,000.
5. Franken (named after Frankenstein) is a maze-solving robot. The maze consists of an aluminum board with 32 squares, around which partitions may be set up in any desired pattern by a member of the audience so as to make a maze. The searching and moving element which explores the maze is a wooden mouse or rat containing a permanent magnet. This is moved by four electromagnets themselves moved by machinery underneath the aluminum surface of the maze. The computing unit consists of some 60 relays; the memory consists of a magnetic drum (called Magdum; see below).
When Franken is completed, a member of the audience will be able to go up to Franken, mark one square with "Food", another square with "Latch One" and another square with "Latch Two". The machine will then be able to learn successively that "Food" is in the "Food" square, and that it has to go to "Latch Two" first and then to "Latch One" so as to "unlock" the "Food" and satisfy its hunger. The machine will also learn the maze, discovering the path to each of the three special squares after exploration. The machine will not be able to distinguish a shortest path from the path which it first finds, but it willbe able to eliminate all blind alleys. Data: 75% complete; finish, laboratory style; reliability, not known; maintenance, will be difficult; our costs so far, about $4,000.
6. Magdum (from "magnetic drum") is a small magnetic drum (materials cost about $50) and associated circuits including some 60 electronic tubes, constructed in order to be the memory for Franken. It has one timing channel and one information channel, and at present can store 128 numbers of 2 binary digits. A member of the audience can select any one of the 126 registers, enter a two-binary-digit number (one of 00, 01, 10, or 11) and find some time later that that number is still there, seeing the number in two neon tubes. This machine was constructed by Ivan Sutherland, age 16, for science fair competitions; and from it he won a $3,000 scholarship to Carnegie Institute of Technology. Data: 99% complete; finish, professional style; reliability, about 97%; maintenance, difficult; our costs so far, about $1,500.
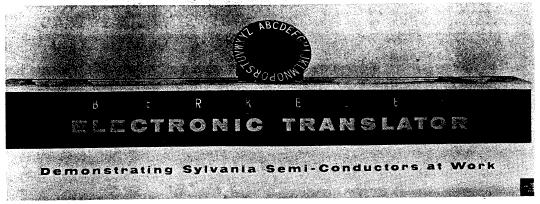
7. The Sylvania Message Display Robot (see Figure 4 -- no longer our robot) was constructed under order from. Sylvania Electric Products for the IRE Show, March 1956, New York. Its purpose was to show the use in handling information of three kinds of Sylvania's parts: photodiodes, crystal diodes and transistors. A member of the audience could have his name punched in code in paper tape. The punched tape was then read photoelectrically by the photodiodes, and the signals, amplified by transistors, were then
translated by a matrix of the crystal diodes into letters of the alphabet. The letters were displayed by the message display unit. Data: complete; finish, professional style; reliability, about 98%; maintenance, not difficult; costs about $4,000.
8. The Four Hundred Year Calendar Machine is a small machine containing three many-position switches, which can be turned to year, month, and day of month; it will then tell the day of the week by shining a light. It runs on four flashlight batteries in parallel. Data:
98% complete; finish, laboratory style; reliability, will probably be 99%; maintenance will probably be easy; our costs so far, about
$200.
9. George the Gogetter (from "let George do it") is a small robot "errand-boy", using relays, electronic tubes, and the paper tape feed borrowed from Simon. The instructions on the paper tape and signals from lights cause George to go here and there over the floor to various points, steering left, right, or straight, and either stopping or not stopping, and either delivering small packages or not delivering packages, depending on instructions and signals. Data 75% complete; finish, laboratory style; reliability, not known; maintenance, probably not
difficult; our costs so far about $800.
10 Marbellina (from "marble")
is an electronic "hen" that "lays" marbles. If a member of the audience shines a light on
a phototube, the
gate to a pipe containing ping-pong balls opens and one ping-pong ball comes out. Data:
completed; finish, professional style; reliability, good; maintenance, easy; our costs so far, about $300.

11. The Divorce Mill with Bigamy Alarm is a small relay machine with buttons and lights. The buttons correspond to four events that can happen to a man "is born; weds; wife dies; is divorced, widowed, remarried, bigamy") as a result of the four stated events, represented by pressing the buttons in certain sequences. The first five lights are white; the sixth one is red and is also connected with an alarm buzzer. If a man marries twice without attending to the petty detail of divorce or widowhood, the bigamy light also shines and the alarm rings. Data: completed; finish, professional; reliability, 99%; maintenance, probably easy; our costs so far, about $250.
12. Electric Shovel. This machine is a remote control electric shovel, capable of shoveling something like puffed wheat or rice krispies. The shovel will go forward or back, turn right or left, vary extension and inclination of the boom, pick up and dump, etc. It is remotely controlled through a stepping switch. A member of the audience can operate it, and have more fun than with a pin-ball machine. Data: 99% complete, but needs fixing; finish, laboratory style; reliability, not yet known; maintenance, not yet known; costs, about $100.
13. The Gantry Crane is a remote-Control small-size gantry crane with an electromagnet hoist. The crane can move left or right; the carriage on the crane can move forward or back; the electromagnet can be raised or lowered. An iron object like a scissors can be picked up, moved from one point or another, and set down again. A member of the audience can operate it and will have more fun than with a pin-ball machine. Data: 99% complete, but needs fixing; finish, laboratory style; reliability, not yet known; maintenance, not yet known; costs, about $100.
14. The Switch Tit Tat Toe Machine is a machine with 9 multiple switches and about 24 lights. It will play limited tit-tat-toe with a member of the audience. When the human player moves, the machine instantaneously signals its move but the human player has to make the macnine's move for it. The machine has been exhibited and is interesting and entertaining, although not self-moving. Data: 99% complete; finish, laboratory style; reliability, very good; maintenance, farily easy; costs, about $200.
15. The Fox, Hen, Corn and Hired Man Machine is a machine with four two-position switches and two lights "safety" and "danger". It runs on one flashlight battery. Here is the problem which it expresses:
The machine has four two-position switches, one for each of the hired man, the fox, the hen, and corn; one position of each switch means "The item is in Barn 1" and the other position means "it is in Barn 2". Data: 100% complete; finish, semi-professional; reliability, over 99%; maintenance, easy. Duplicates of the machine will be made on order and shipped for $39 (eastern U. S.) in about three weeks.
Following is a list mentioning some ofour other small robots (including some machines which will calculate or reason automatically, but which will not act by themselves):
Simplac: a prototype, containing a magnetic drum memory, of a simple automatic electronic digital computer that will do useful work; cost so far, about $6,000
Sundorra 21: a game-playing machine that will play the game of "Sundorra 21" with a human being
Shrinkit: a technical machine that will operate with "Boolean algebra" and minimize the number of relays that may be required for certain circuits
Nim Machine: a machine that will play a form of the game of Nim with a human being
Black Match Machine: a machine that will play a form of the game of Black Match with a human being
Intelligence Testing Machine: a machine which will score a human being on an intelligence test
In addition to these small robot machines, we also offer two electric brain construction kits. One is the Geniac kit ($17.95), containing over 400 parts, including six multiple switches of a new design. This kit, with its 64-page manual, will enable one to make over 30 small electric brain machines that reason arithmetically or logically, play games, including Nim and Tit-Tat-Toe, solve puzzles, etc. Each machine runs on one flashlight battery; all connections are with nuts and bolts with no soldering required. The other is the Tyniac electric brain construction kit ($9.95) containing over 250 parts, including four multiple switches of the new design, and a 48-page manual. This kit will enable over a dozen small electric brain machines to be made, and in addition over 15 Geniacs to be made.
As a result of the study and experience which we have had so far, we can put down some of our conclusions about present possibilities in small robots. Let us begin with a definition: A robot is a machine made out of hardware, wire, etc., which can receive or "sense" information from its environment using its "sense organs", perform actions or display behavior using its "acting organs", and perform logical or arithmetical operations correlating the sense impressions and the actions, using its "thinking organs " or "brain".
Acting Organs. Almost any kind of action that a machine can perform is possible for a robot. Some of the easiest actions are: turning a light on and off; turning a motor on and off; making various noises. This permits moving from place to place, steering, etc. It is however rather difficult, but not impossible, to have a robot pick up something or position something.
Sensing Organs. The sensations which a machine or a robot can detect include the following: the turning of a switch; the pressing of a button; the presence of a light (it can "see" a light); the presence of a radio wave; the presence of a loud noise (it can "hear" a noise); the presence of an electrical conduct or; etc. No small robot however can yet "recognize"; it cannot distinguish shapes or outlines in a scene, nor distinguish words among a series of sounds (although now some experimental machines are beginning to recognize)
No small robot, and in fact no machine, can so far as we know taste or smell.
Thinking Organs. In regard to logical and reasoning operations, it is remarkable that rather intelligent and complicated behavior can be fairly easily organized with fewer than 50 to 100 relays, provided not much memory is required.
Memory is a harder problem. However, there are some new devices such as magnetic drums which may provide a fairly adequate memory for small robots.
As mentioned before, no small robot and no machine is yet able to have either a visual memory which will remember a two-dimensional visual field, or an aural memory of words.
James. One possible kind of robot, for example, which we have called James, might be a robot which would greet people coming up a moving stairs into an exhibition in a large department store. As Mrs. Smith came up the stairs, James would say to her, "I am very glad to see you. Won't you shake hands with me?"
If Mrs. Smith shook hands, James would say, "Thank you; welcome to our new exhibition."
If Mrs. Smith would not shake hands with him, he would say, "Well, I am sorry you won't shake hands with me, but you are certainly welcome to our exhibition anyhow". Then as Mrs. Smith stepped past him, he would say, "Oh, here is a little memento of your meeting with me", and issue some novelty to her. James is possible because we could store within James different recorded sentences, and the capacity to utter different sentences as different sensations were presented.
Other Combinations. A great many different combinations of hardware to make robots are now possible. The room for new, interestig, and useful robots is very great.
Power. The power for some robots can come from ordinary electric outlets. For other robots, the power can come from batteries, although usually it is a difficult problem to get enough power from ordinary small batteries.
Reliability. An important requirement for robots on exhibit is that they be reliable. Reliability depends upon conservative principles, good materials, good construction, and proper maintenance; and the last three cost money. Where reliability is of prime importance, it is easily possible to avoid principles, materials, and construction which may be unreliable, and to provide good maintenance.
The formula we would use ordinarily for computing a selling price is cost of materials,
plus cost of labor, all plus 70% for overhead, plus 18% for general and administrative expenses, plus 10% for profit.
For computing a rental, for one week at a big show, we would ordinarly ask 25% of the selling price for the first rental, and about 15% of the selling price for each later rental. The range of rental for our existing small robots is subject to a minimum of $15 and to a maximum of $150 per day.
To meet special circumstances we would take other conditions into account, such as the limitations of the advertising director's budget. We have no wish to be unreasonable.
The cost for maintenance of a small robot is not included in the price of purchase or rental. Ordinarily we instruct engineers (or other informed and responsible persons) employed by the organization purchasing or renting the small robot, in regard to the proper maintenance of the machine.
|
513 Ave. of the Americas, 2 Fl New York 11, N.Y. |
815 Washington Street, 2 Fl Newtonville 60, Mass. |